汽車商業(yè)評論2024-06-27 16:06

![]()


撰文?/ 曹旭東 (Momenta CEO)
編輯?/ 周 洲
設(shè)計?/ 師 超
智能駕駛獨(dú)角獸Momenta正在赴美上市的路上。
Momenta已經(jīng)與全球排名前十的汽車集團(tuán)中的一半,展開了量產(chǎn)合作。這些車企客戶有上汽集團(tuán)、通用汽車、豐田、奔馳等,同時這些主機(jī)廠也是Momenta的投資方。
自2016年成立,Momenta經(jīng)過7輪融資,累計融資額近13億美元。其資方既包括上述戰(zhàn)略合作車企,有博世這類一級供應(yīng)商,有互聯(lián)網(wǎng)大廠如騰訊、馬云的云鋒基金、小米系的順為資本,還有知名的投資機(jī)構(gòu)淡馬錫、IDG、GGV紀(jì)源資本。

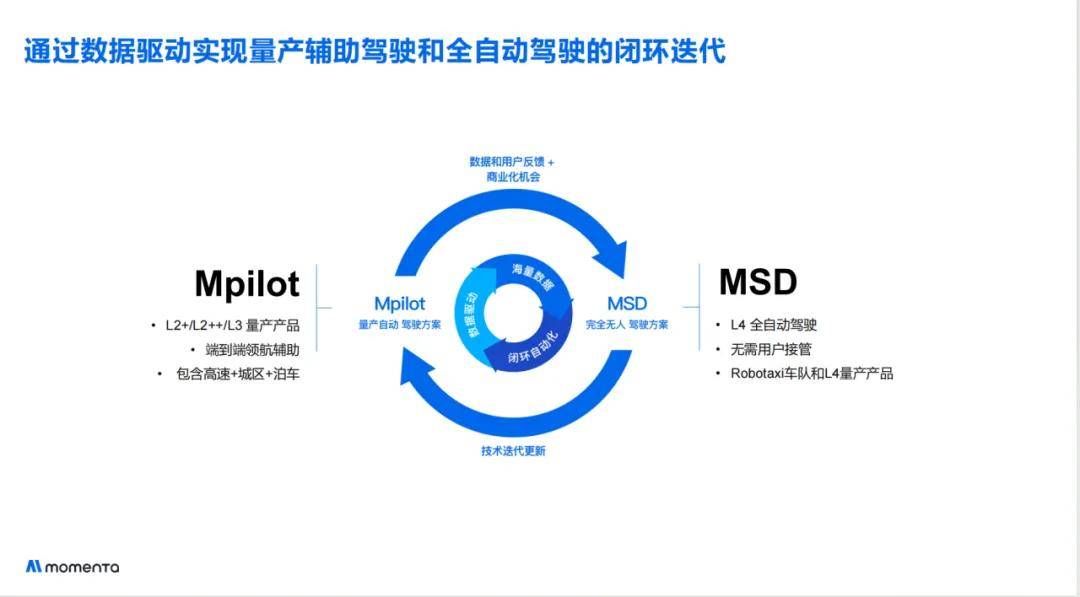
Momenta從創(chuàng)立之初就確立了“一個飛輪,兩條腿”的戰(zhàn)略。“一個飛輪”指的是數(shù)據(jù)驅(qū)動的AI飛輪,“兩條腿”指的是Mpilot量產(chǎn)自動駕駛方案和MSD完全無人駕駛方案,既做智能輔助駕駛,又做Robotaxi。這兩條腿之間產(chǎn)生很好的協(xié)同,量產(chǎn)自動駕駛帶來數(shù)據(jù)流,給到完全無人駕駛,而完全無人駕駛反饋技術(shù)流、技術(shù)的更新迭代,給到量產(chǎn)自動駕駛,使得量產(chǎn)的產(chǎn)品在市場上更有競爭力,不斷為用戶刷新更好的使用體驗。
6月15日下午,在第十六屆中國汽車藍(lán)皮書論壇智能駕駛專場,Momenta CEO曹旭東作了主題為《通往自動駕駛的可規(guī)模化路徑》的演講。
他在簡介了Momenta的產(chǎn)品以及一個“一個飛輪,兩條腿”的戰(zhàn)略之后,提出了智能駕駛的摩爾定律。
曹旭東認(rèn)為,能夠?qū)崿F(xiàn)城市NOA的高階智能駕駛今年進(jìn)入爆發(fā)期,是因為智駕的摩爾定律。
智駕摩爾定律包含兩部分,一個是智駕硬件的摩爾定律:同等算力情況下,每兩年硬件成本減半。兩年前實現(xiàn)城市NOA的BOM(Bill of Material,物料清單)成本是15000-20000元,現(xiàn)在差不多是7000-10000元,2026年大概是4000-5000元,特斯拉FSD的BOM成本已經(jīng)做到4000元了。硬件有極限,整個BOM實現(xiàn)4000元出頭之后再往下降就非常難,也不是特別有必要。一個是智駕軟件的摩爾定律:(每兩年)軟件體驗提升十倍。兩年10倍,四年100倍,六年1000倍,智駕的體驗會好到超乎大家的想象。
他覺得未來能夠跟上智駕摩爾定律的公司能夠生存下來,能超越摩爾定律的公司可以成為一家卓越的公司。
以下是曹旭東演講實錄。
曹旭東:首先非常感謝受邀參加這個活動,非常榮幸,非常感謝各位老師和各位領(lǐng)導(dǎo),有機(jī)會能給大家匯報一下我們公司的一些思考。
先看一個視頻,是關(guān)于我們產(chǎn)品的集錦,對我們公司有一個直觀的介紹。因為一個(智能駕駛)公司的本質(zhì)就是做產(chǎn)品,產(chǎn)品作為載體給用戶創(chuàng)造價值,(視頻)能看一下我們的產(chǎn)品是什么樣子的,以及給用戶創(chuàng)造什么樣的價值。這是我們的城市領(lǐng)航,現(xiàn)在可以做到有路就能開,有導(dǎo)航就能開,有高德的導(dǎo)航能開得更好。
可以看到,中國的路況挺復(fù)雜的,既有大城市的大路,也有小城市的小路,非常豐富。我現(xiàn)在出差最大的一個樂趣就是,去到每一個城市都(體驗)有我們(智駕產(chǎn)品)的自動駕駛的車,從機(jī)場到(拜訪)客戶,而且專門選那種刁鉆難走的路,非常有意思。
這個是去年年底的冬測。可以看到在逆光揚(yáng)雪冰雪路面的情況下,AEB也可以剎停,保障用戶的生命安全。我們有一個非常重要的愿景,就是“十年挽救百萬生命”,現(xiàn)在AEB每周有對應(yīng)的KPI來跟蹤觸發(fā)的數(shù)量。這里是用戶的一些反饋。(播放視頻)更好的人工智能,更好的生活,希望越來越好的智駕能夠給大家?guī)砀踩⒏残摹⒏玫纳铙w驗。
簡要地介紹一下我們公司。我們公司成立到現(xiàn)在有8年時間,獲得了很多車企的支持,比如上汽、通用汽車、奔馳、豐田等,通過非常好的合作和非常好的交付,我們建立起來了很好的信任關(guān)系,最終(這些車企)也成為我們的戰(zhàn)略投資人。我們公司現(xiàn)在大概有1300人,辦公地點(diǎn)很多,最大的兩個辦公室主要在北京和蘇州,另外在上海、杭州、廣州、深圳都有辦公室,海外在德國斯圖加特、日本豐田市(Toyota City)、美國桑尼維爾(Sunnyvale,硅谷重鎮(zhèn))都有辦公室。
我們公司很重要的一個文化是以客戶價值為中心,只要能跟客戶建立深度的量產(chǎn)合作,我們都會在客戶旁邊去建辦公室。因為智駕是一個特別復(fù)雜的系統(tǒng),所以我們在建辦公室的時候,尤其是客戶的第一個平臺、第一輛車量產(chǎn)的時候,我們有一個很重要的原則,就是跟客戶肩并肩作戰(zhàn)、肩并肩辦公,這樣才能及時溝通、及時解決(客戶)第一個平臺第一臺車量產(chǎn)過程中的各樣問題,建立起兩個組織之間合作的信任。
做完我們公司的基礎(chǔ)情況匯報之后,我來匯報一下公司的一個思考:就是怎么能夠?qū)崿F(xiàn)可規(guī)模化的L4。其實這個思考不算新東西,公司2016年成立的時候思考的很多內(nèi)容其實都在了。我們公司剛成立的時候就希望能夠?qū)崿F(xiàn)可規(guī)模化的L4。
什么是可規(guī)模化的L4?不是說在某一個地方、某一個區(qū)域有畫好的高精度地圖,幾十輛車或者幾百輛車不停地跑啊跑,雖然這有可能叫做L4,但是不是可規(guī)模化的L4。
可規(guī)模化的L4是全國都能開甚至全球都能開,并且能夠達(dá)到人類(司機(jī))的安全水平甚至超過人類(司機(jī))的安全水平——達(dá)到10于倍人類(司機(jī))的安全水平,這個是我們希望實現(xiàn)的可規(guī)模化的L4。

可規(guī)模化的L4最關(guān)鍵的就是安全。我們覺得哪怕是乘用車要實現(xiàn)可規(guī)模化的L4,安全水平也應(yīng)該達(dá)到10倍于人類司機(jī)的安全水平。而如果是做Robotaxi(L4)的話,10倍的安全水平可能還不夠。我們做過計算,如果Robotaxi在幾個城市要大規(guī)模商用,至少需要近10萬臺車,10萬臺車可能需要100—1000倍人類司機(jī)的安全水平才能達(dá)到足夠的安全性,因為根據(jù)我們的觀察Robotaxi對于安全事故的接受度是更低的,大家可以參考最近Cruise Automation(GM旗下無人駕駛車公司)最近的一起事故,就可以看到消費(fèi)者、社會對于Robotaxi的安全閾值是非常非常高的。
那怎么達(dá)到這么高的安全性呢?很重要的就是要解決數(shù)百萬個長尾問題。這數(shù)百萬個長尾問題是非常具有挑戰(zhàn)性的。舉個例子,我們有一次路測的時候剛好遇到了逆行,但逆行的不是一輛車,逆行的是一頭大象。逆行的三輪車中國很常見,逆行的大象在中國路測的時候也會遇到,這些都是需要解決的長尾問題,這樣的長尾問題有數(shù)百萬個,那就決定了很難用rule-based(規(guī)則導(dǎo)向)或者是Human-driven(人為驅(qū)動)的方式去解決問題。
如果是Human-driven的話,你可以用100個人、1000個人去解決100、1000個頭部問題,但是很難用這些人去解決數(shù)百萬個長尾問題。這就引出了我們第一個關(guān)鍵的洞察:數(shù)據(jù)驅(qū)動的飛輪,用這個數(shù)據(jù)驅(qū)動的飛輪自動化地解決數(shù)百萬個長尾問題。
我們現(xiàn)在的數(shù)據(jù)驅(qū)動的飛輪已經(jīng)迭代到第五代了。第一代能夠自動化地解決50%的問題,第二代70%,第三代90%,第四代95%,現(xiàn)在第五代超過99%的問題都可以自動化地去解決,這樣極大地提升了整個研發(fā)迭代的效率、解決這些長尾問題的效率。
第二個關(guān)鍵的洞察是:數(shù)據(jù)驅(qū)動的飛輪一定需要數(shù)據(jù),那我們到底需要多少數(shù)據(jù)才能夠?qū)崿F(xiàn)規(guī)模化的L4呢?
我們在2016年公司成立之前就提出了這個問題。當(dāng)時我們算了答案之后非常吃驚,也非常驚訝。我們計算完之后,需要1000億公里的數(shù)據(jù)。1000億公里的數(shù)據(jù),如果是一年跑10萬公里的出租車,大概一年需要100萬臺車;如果是乘用車的話,大概需要500萬臺以上跑一年,才有足夠的數(shù)據(jù)去驗證這套系統(tǒng)是不是達(dá)到了可規(guī)模化的L4。
當(dāng)然,訓(xùn)練是一個必要條件,還不是一個充分條件,充分條件的話有可能這些數(shù)據(jù)就夠了,也有可能需要更多的數(shù)據(jù)才能夠?qū)崿F(xiàn)可規(guī)模化的L4。這就引出了我們公司很重要的一個戰(zhàn)略叫“一個飛輪,兩條腿”。
我們根據(jù)前兩個洞察判斷,如果要實現(xiàn)可規(guī)模化的L4,第一,整個軟件算法架構(gòu)、整個研發(fā)體系必須是一個數(shù)據(jù)飛輪的驅(qū)動,才有可能實現(xiàn)可規(guī)模化的L4;第二,一定得量產(chǎn)。沒有量產(chǎn)不可能有幾百萬臺車,沒有幾百萬臺車的話根本沒有辦法實現(xiàn)規(guī)模化的L4。
基于這兩個洞察就引出來我們的戰(zhàn)略,其實非常通俗,叫做“一個飛輪兩條腿”。其中,一條腿是Mpilot量產(chǎn)自動駕駛方案,另外一條腿是MSD——完全無人的駕駛方案,我們的整個算法是按照MSD的標(biāo)準(zhǔn)和要求設(shè)計的,之后再應(yīng)用于量產(chǎn)。
這“兩條腿”有很好的協(xié)同。量產(chǎn)自動駕駛帶來數(shù)據(jù)流,給到完全無人駕駛,而完全無人駕駛反饋技術(shù)流、技術(shù)的更新迭代,給到量產(chǎn)自動駕駛,使得量產(chǎn)的產(chǎn)品在市場上更有競爭力,不斷給用戶刷新更好的使用體驗。
介紹完“一個飛輪兩條腿”的戰(zhàn)略之后,介紹我們的飛輪。
飛輪有三個因子。第一個是數(shù)據(jù)驅(qū)動的算法,第二個是海量的數(shù)據(jù),然后是閉環(huán)自動化。
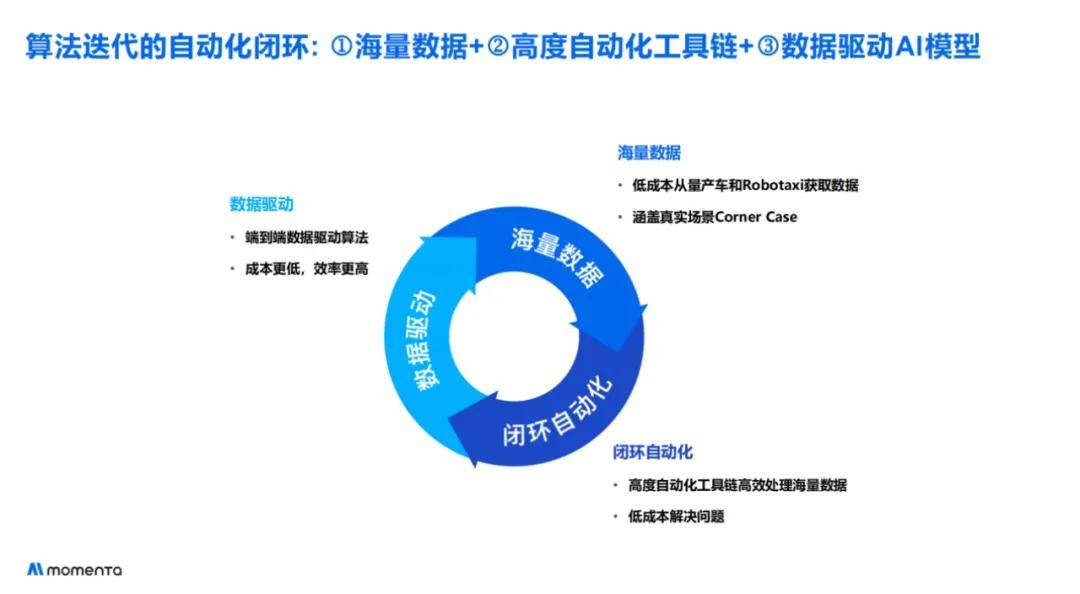
我們先介紹一下海量的數(shù)據(jù)。我們現(xiàn)在的數(shù)據(jù)量已經(jīng)比較大了,去年年底大概是5萬臺車(上)量產(chǎn)的高階智駕,今年年底大概差不多(能覆蓋)30萬臺車,明年年底大概是100到150萬臺車會量產(chǎn)我們的高階智駕,到了2028年的時候,我們估計累計的量應(yīng)該會超過1000萬臺。
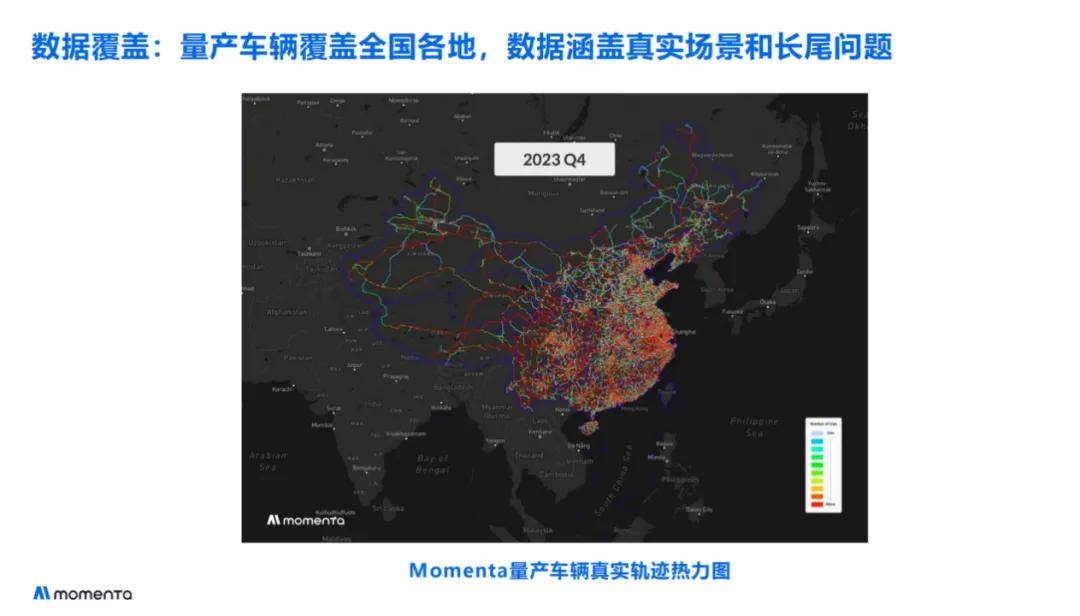
數(shù)據(jù)的增速也是一個指數(shù)級的增速,大家可以看一下這個短小的視頻,這是2022年量產(chǎn)之后,數(shù)據(jù)很快地從一開始只覆蓋經(jīng)濟(jì)發(fā)達(dá)的沿海地區(qū),到覆蓋全國,再到覆蓋全國紅得發(fā)黑(表示數(shù)據(jù)增速極快),其實就用了大概一年多一點(diǎn)的時間。相信隨著車的增加,整個數(shù)據(jù)的增速是非常快的。
有了這些海量數(shù)據(jù),大家會逐漸發(fā)現(xiàn)一旦大規(guī)模量產(chǎn)之后,稀缺的就不是車或者稀缺的就不是數(shù)據(jù)了。
車和數(shù)據(jù)就有點(diǎn)像沙子或者有點(diǎn)像鐵礦石,真正稀缺的能力是如何把這些礦藏——而且這個礦藏含礦率可能不是那么高,它可能是貧礦,更像貧瘠的礦產(chǎn),你如何在比例只有千分之一甚至萬分之一的沙子、礦石里面,把這個鐵提取出來,把鐵提取出來之后再煉成鋼,再把鋼造成發(fā)動機(jī),最后再把發(fā)動機(jī)裝到車上。這一整套的數(shù)據(jù)閉環(huán)的能力就變得越來越重要、越來越稀缺了。
當(dāng)有了海量的數(shù)據(jù)之后,在我們體系內(nèi)部叫做閉環(huán)自動化,在不同的公司有不同的叫法,(有)叫“數(shù)據(jù)閉環(huán)”、“數(shù)據(jù)工廠”等等,這個能力就變得尤其稀缺、尤其重要,而且非常關(guān)鍵,尤其是整個自動駕駛軟件算法架構(gòu)在逐漸往大模型方向發(fā)展的時候,這個基礎(chǔ)設(shè)施的建設(shè)就變得尤其重要。
我們的基礎(chǔ)設(shè)施包含了車端數(shù)據(jù)基礎(chǔ)設(shè)施FDI,還有云端的數(shù)據(jù)基礎(chǔ)設(shè)施CDI,再到自動化的數(shù)據(jù)標(biāo)注,再到訓(xùn)練集群。訓(xùn)練集群大概有1萬多張GPU,再到仿真的(里程數(shù))。我們現(xiàn)在每周能夠做的仿真里程數(shù)已經(jīng)接近2000萬公里。另外,我們每月OTA的數(shù)量也很快。
介紹完我們的數(shù)據(jù)和閉環(huán)自動化之后,關(guān)于整個算法架構(gòu)到端到端的大模型,現(xiàn)在整個AI發(fā)展的趨勢是逐漸由小模型到大模型,由專用的小模型到多個專用的小模型組合起來去完成任務(wù),變成了一個更加通用的大模型去完成任務(wù),不管在自然語言(處理)、計算機(jī)視覺還是在自動駕駛,這個趨勢都在發(fā)生。這里我跟大家也匯報一下我們在自動駕駛上的一些實踐。
我們現(xiàn)在在自動駕駛上已經(jīng)做到了算法5.0,在這之前有(算法)2.0、3.0、4.0。
跟大家匯報三點(diǎn):第一,大家可以看到在(算法)2.0的時候,尤其是感知的部分,我們有多個小模型。到3.0的時候我們把融合、跟蹤和預(yù)測合并成了更大一點(diǎn)的模型,能夠完成更加通用的任務(wù)。到了4.0就進(jìn)一步合并成更大的、更通用的模型。這個趨勢基本上也是行業(yè)里非常先進(jìn)的一些玩家共同探索的一個方向。
第二,在規(guī)劃的這部分,我們在行業(yè)里面屬于探索的先頭兵。我們實際上在2020年的時候就已經(jīng)開始用Deep Learning(深度學(xué)習(xí))來做planning(規(guī)劃)了,最終把這套東西做到比較成熟能夠量產(chǎn)上車,是在2023年上半年,這個時間點(diǎn)甚至比特斯拉用Deep Learning做planning的時間更早。去年,特斯拉V11的planning還是rule-based planning,但是今年V12已經(jīng)升級到端到端的Deep Learning的planning。大家可以看到一個趨勢,在planning的部分,逐漸用深度學(xué)習(xí)去替代傳統(tǒng)的基于規(guī)則的、基于優(yōu)化的planning,這是第二個趨勢。
第三個趨勢就是端到端的大模型,這個詞現(xiàn)在也非常熱。我匯報一下我們的架構(gòu)設(shè)計,可能跟特斯拉有相同的部分,也有不一樣的部分。
最不一樣的部分是我們的端到端分了兩個支路。一個支路是端到端的大模型,類比于人類的長期記憶。另外一個支路分成了兩階段,DDOD加上DDLD相當(dāng)于是感知的部分,DLP是Deep Learning的planning,是認(rèn)知的部分。這個支路相當(dāng)于是人類的短期記憶。
為什么一定要構(gòu)建一個長期記憶、構(gòu)建一個短期記憶呢?其實最主要的原因是為了更好的、更低成本的、更短周期的試錯,因為用深度學(xué)習(xí)來做自動駕駛的話,它是一個開始,不是一個結(jié)束。開始的話意味著未來還會有很多的探索和升級,如何把整個試錯成本降低,這是生物演進(jìn)也需要達(dá)到的一個效果,那對于我們來說也需要達(dá)到這個效果。
埃隆·馬斯克的推特說他去年花了20億美金構(gòu)建他的數(shù)據(jù)中心,今年計劃用100億美金去做自動駕駛的訓(xùn)練和推理。可以看到,自動駕駛的大模型訓(xùn)練其實試錯的成本非常高,訓(xùn)練一個模型可能要花百萬美金甚至幾百萬美金,如果方法錯了或者數(shù)據(jù)錯了,那幾百萬美金就打了水漂了。
我們的設(shè)計是短期記憶的訓(xùn)練成本比較低,因為真正需要探索的是DLP(Deep Learning的planning)部分。所以在短期記憶上很重要的一件事情就是驗證這個方法是不是正確以及用于訓(xùn)練的數(shù)據(jù)是不是正確,是不是好的方法,是不是好的數(shù)據(jù)。這樣短期記憶的訓(xùn)練成本會比較低,訓(xùn)練的周期也會比較短,能夠比較快速地去解決一個問題、更新一個feature、驗證一個方法、驗證一批數(shù)據(jù)。最終我們被驗證過的好的方法、好的數(shù)據(jù),在積累一段時間之后再應(yīng)用到我們端到端的大模型上(就是長期記憶),這樣能夠保證長期記憶的訓(xùn)練基本上一次訓(xùn)練就能訓(xùn)練對,一次訓(xùn)練就能訓(xùn)練好。這其實也是跟人的長期記憶、短期記憶很像,人去探索環(huán)境的時候,最先更新的是短期記憶,當(dāng)這個短期記憶學(xué)習(xí)到一些成功的經(jīng)驗之后,這些成功的經(jīng)驗再更新到人的長期記憶中去,這樣就能夠更加低成本、短周期地去適應(yīng)環(huán)境,更加低成本、短周期地去探索更好的方法以及更好的數(shù)據(jù)。這就是我們的端到端大模型整個算法架構(gòu)的思路。通過這樣一個做法,比直接完全用端到端的大模型去試錯,訓(xùn)練的成本應(yīng)該能小10到100倍。
介紹完端到端大模型的算法架構(gòu)和背后的思考,這里有一個簡短的視頻,來看一下現(xiàn)在能夠取得的效果。(播放視頻)
我們發(fā)現(xiàn)端到端的模型對于施工道路的變化和非結(jié)構(gòu)化的道路學(xué)習(xí),以及適應(yīng)的能力、泛化的能力都是非常強(qiáng)的。現(xiàn)在我們這套端到端的大模型系統(tǒng)已經(jīng)在一些客戶(的車)上量產(chǎn)了,包括上汽的智己、騰勢,還有昊鉑。時間有限,看更多的視頻還不如上車體驗,未來有機(jī)會希望能夠邀請各位老師、各位領(lǐng)導(dǎo)一起上車體驗。
這里我再快速介紹一下一個思考,就是智駕的摩爾定律以及高階智駕的規(guī)模化。
我們認(rèn)為當(dāng)前是高階智駕的一個引爆點(diǎn)。去年如果是拐點(diǎn)的話,今年就是引爆點(diǎn)。作為類比,有點(diǎn)像電動車的2020年。大家知道2020年到現(xiàn)在2024年,電動車的滲透率增速非常快,同樣,能夠?qū)崿F(xiàn)城市NOA的高階智能駕駛也進(jìn)入了爆發(fā)期。
為什么會有爆發(fā)期?我們認(rèn)為主要因為是智駕的摩爾定律。
智駕的摩爾定律是我們內(nèi)部的一個說法,它包含了兩部分,一個是智駕硬件的摩爾定律,另外一個是智駕軟件的摩爾定律。
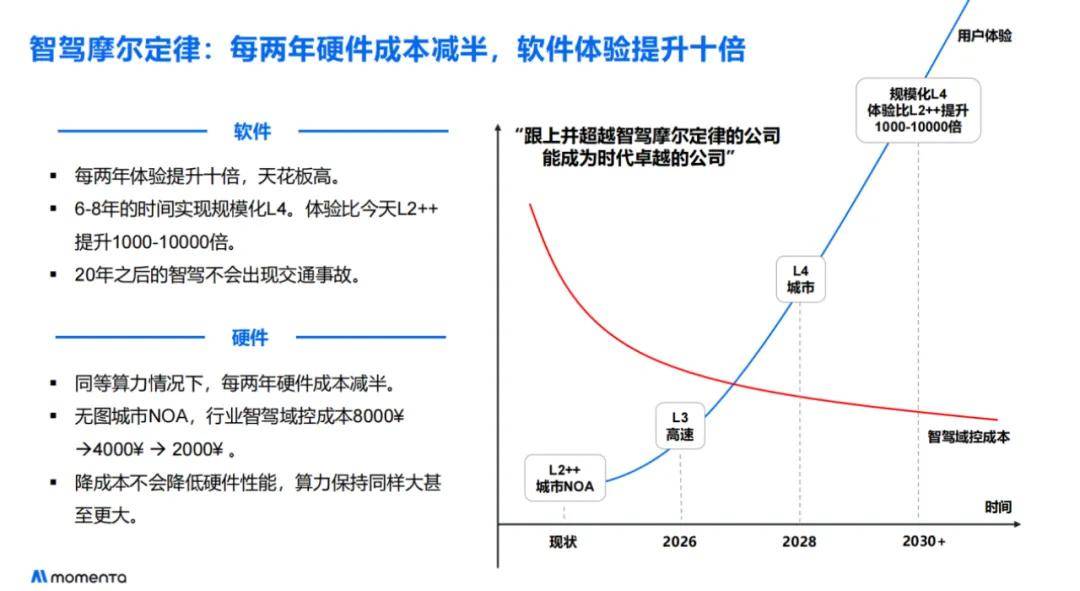
硬件的摩爾定律就是每兩年硬件的成本會降一半,這是一個經(jīng)驗公式。
比如兩年前能夠?qū)崿F(xiàn)的城市NOA,基本上一套BOM成本,加上域控,加上傳感器,包括攝像頭、激光雷達(dá)等,大概需要15000-20000元。但現(xiàn)在的話,實現(xiàn)一套城市NOA 的BOM成本差不多能做到7000—10000元,再過兩年到2026年的時候,能夠?qū)崿F(xiàn)的BOM大概是4000—5000元。
4000—5000元這個數(shù)字也不是我們瞎想的。大家仔細(xì)去研究一下特斯拉FSD,你會發(fā)現(xiàn)它的BOM成本已經(jīng)做到4000元了。所以有特斯拉在引領(lǐng)這個行業(yè),我相信在2026年的時候整個行業(yè)能夠?qū)崿F(xiàn)城市NOA智駕的BOM基本上能夠做到4000元出頭。當(dāng)然硬件的摩爾定律是有極限的,整個BOM做到4000出頭再往下降的話就非常難了,也不是特別有必要了。
另外一個方面,sky the limited——沒有天花板的就是智駕的軟件摩爾定律。由于大規(guī)模的量產(chǎn)、大模型的上車,由于非常好的數(shù)據(jù)工廠、數(shù)據(jù)閉環(huán)自動化的迭代,我們看到的一個趨勢就是每兩年智駕的水平至少提升10倍。
10倍是什么感受?可以舉一個例子,最近有一個客戶來拜訪我們,體驗了我們NOA的產(chǎn)品,他說他也試了另外一家非常牛的產(chǎn)品,但是兩年前他開那輛車的話就覺得汗流浹背,兩年后用我們的產(chǎn)品,就覺得有頭等艙的體驗。并不是說我們比另外一家做得好,另外一家在過去的兩年應(yīng)該也提升了10倍,如果他再去體驗的話也應(yīng)該會有頭等艙的體驗,而是說整個行業(yè)的頭部公司每兩年都能把智駕的體驗從兩年前的汗流浹背提升到頭等艙的體驗。

可以暢想一下,兩年(智能駕駛體驗提升)10倍,四年(提升)100倍,六年(提升)1000倍,如果(經(jīng)過)未來兩年、兩年再兩年,那這個智駕的體驗會好到超乎大家的想象。
最后簡單總結(jié)一下:我們覺得未來能夠跟上(智駕)摩爾定律的公司能夠生存,能超越摩爾定律的公司能夠成為一家卓越的公司。
希望能夠跟各位老師和各位領(lǐng)導(dǎo)建立起更好的合作關(guān)系,希望能夠一起打造卓越的產(chǎn)品,一起來超越摩爾定律。
好,謝謝大家。
 京公網(wǎng)安備 11010802028547號
京公網(wǎng)安備 11010802028547號
 購物車
購物車