經(jīng)觀汽車2024-07-08 06:16

![]()
7月5日,理想汽車在2024智能駕駛夏季發(fā)布會(huì)宣布將于7月內(nèi)向全量理想AD Max用戶推送“全國(guó)都能開”的無圖NOA,并將于7月內(nèi)推送全自動(dòng)AES(自動(dòng)緊急轉(zhuǎn)向)和全方位低速AEB(自動(dòng)緊急制動(dòng))。同時(shí),理想汽車發(fā)布了基于端到端模型、VLM視覺語言模型和世界模型的全新自動(dòng)駕駛技術(shù)架構(gòu),并開啟新架構(gòu)的早鳥計(jì)劃。
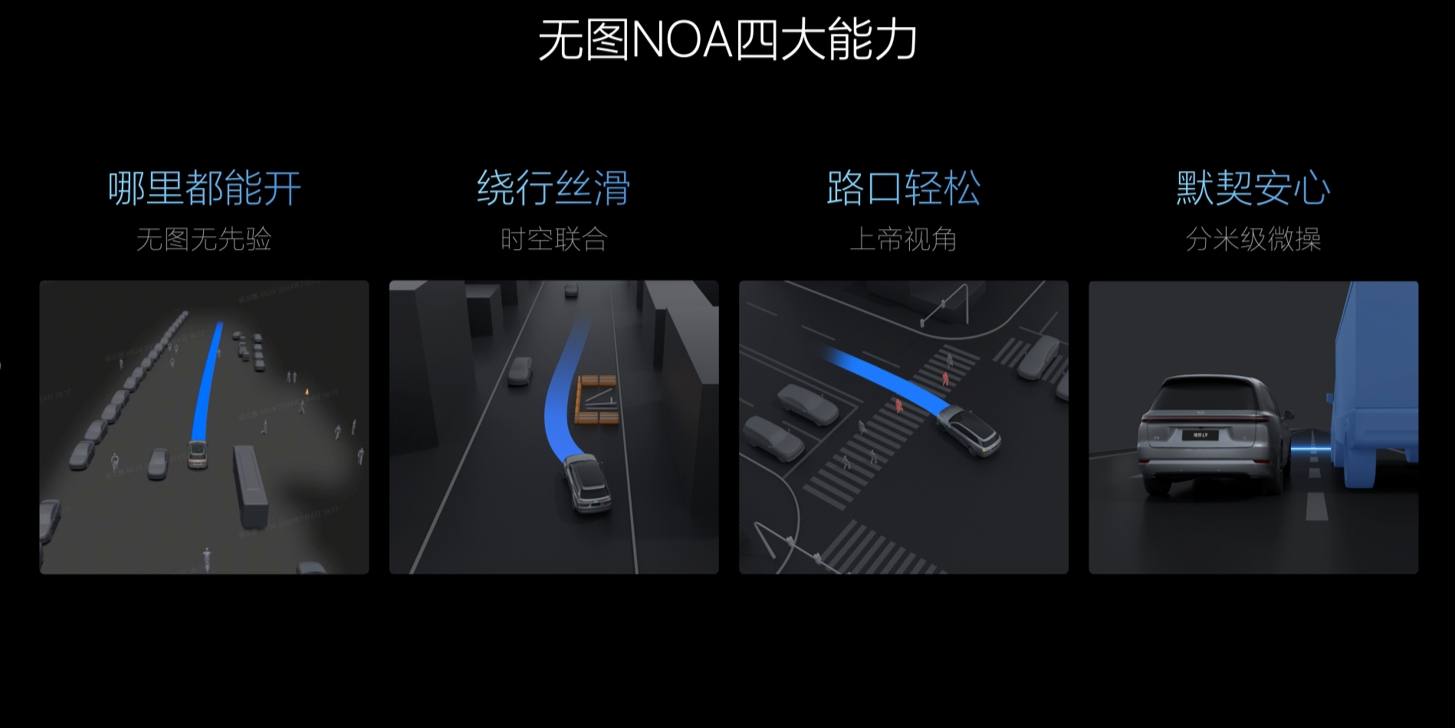
智能駕駛產(chǎn)品方面,無圖NOA不再依賴高精地圖或先驗(yàn)信息,在全國(guó)范圍內(nèi)的導(dǎo)航覆蓋區(qū)域均可使用,并借助時(shí)空聯(lián)合規(guī)劃能力帶來更絲滑的繞行體驗(yàn)。無圖NOA也具備超遠(yuǎn)視距導(dǎo)航選路能力,在復(fù)雜路口依然可以順暢通行。同時(shí),無圖NOA充分考慮用戶心理安全邊界,用分米級(jí)微操帶來默契安心的智駕體驗(yàn)。
此外,即將推送的AES功能可以實(shí)現(xiàn)不依賴人輔助扭力的全自動(dòng)觸發(fā),規(guī)避更多高危事故風(fēng)險(xiǎn)。全方位低速AEB則再次拓展主動(dòng)安全風(fēng)險(xiǎn)場(chǎng)景,有效減少低速挪車場(chǎng)景的高頻剮蹭事故發(fā)生。
自動(dòng)駕駛技術(shù)方面,新架構(gòu)由端到端模型、VLM視覺語言模型和世界模型共同構(gòu)成。端到端模型用于處理常規(guī)的駕駛行為,從傳感器輸入到行駛軌跡輸出只經(jīng)過一個(gè)模型,信息傳遞、推理計(jì)算和模型迭代更高效,駕駛行為更擬人。
VLM視覺語言模型具備強(qiáng)大的邏輯思考能力,可以理解復(fù)雜路況、導(dǎo)航地圖和交通規(guī)則,應(yīng)對(duì)高難度的未知場(chǎng)景。同時(shí),自動(dòng)駕駛系統(tǒng)將在基于世界模型構(gòu)建的虛擬環(huán)境中進(jìn)行能力學(xué)習(xí)和測(cè)試。世界模型結(jié)合重建和生成兩種路徑,構(gòu)建的測(cè)試場(chǎng)景既符合真實(shí)規(guī)律,也兼具優(yōu)秀的泛化能力。
將于7月內(nèi)推送的無圖NOA帶來四項(xiàng)重大能力升級(jí),全面提升用戶體驗(yàn)。首先,得益于感知、理解和道路結(jié)構(gòu)構(gòu)建能力的全面提升,無圖NOA擺脫了對(duì)先驗(yàn)信息的依賴。用戶在全國(guó)范圍內(nèi)有導(dǎo)航覆蓋的城市范圍內(nèi)均可使用NOA,甚至可以在更特殊的胡同窄路和鄉(xiāng)村小路開啟功能。
其次,基于高效的時(shí)空聯(lián)合規(guī)劃能力,車輛對(duì)道路障礙物的避讓和繞行更加絲滑。時(shí)空聯(lián)合規(guī)劃實(shí)現(xiàn)了橫縱向空間的同步規(guī)劃,并通過持續(xù)預(yù)測(cè)自車與他車的空間交互關(guān)系,規(guī)劃未來時(shí)間窗口內(nèi)的所有可行駛軌跡。基于優(yōu)質(zhì)樣本的學(xué)習(xí),車輛可以快速篩選最優(yōu)軌跡,果斷而安全地執(zhí)行繞行動(dòng)作。
在復(fù)雜的城市路口,無圖NOA的選路能力也得到顯著提升。無圖NOA采用BEV視覺模型融合導(dǎo)航匹配算法,實(shí)時(shí)感知變化的路沿、路面箭頭標(biāo)識(shí)和路口特征,并將車道結(jié)構(gòu)和導(dǎo)航特征充分融合,有效解決了復(fù)雜路口難以結(jié)構(gòu)化的問題,具備超遠(yuǎn)視距導(dǎo)航選路能力,路口通行更穩(wěn)定。
同時(shí),無圖NOA重點(diǎn)考慮用戶心理安全邊界,用分米級(jí)的微操能力帶來更加默契、安心的行車體驗(yàn)。通過激光雷達(dá)與視覺前融合的占用網(wǎng)絡(luò),車輛可以識(shí)別更大范圍內(nèi)的不規(guī)則障礙物,感知精度也更高,從而對(duì)其他交通參與者的行為實(shí)現(xiàn)更早、更準(zhǔn)確的預(yù)判。得益于此,車輛能夠與其他交通參與者保持合理距離,加減速時(shí)機(jī)也更加得當(dāng),有效提升用戶行車時(shí)的安全感。
在主動(dòng)安全領(lǐng)域,理想汽車建立了完備的安全風(fēng)險(xiǎn)場(chǎng)景庫,并根據(jù)出現(xiàn)頻次和危險(xiǎn)程度分類,持續(xù)提升風(fēng)險(xiǎn)場(chǎng)景覆蓋度,即將在7月內(nèi)為用戶推送全自動(dòng)AES和全方位低速AEB功能。
為了應(yīng)對(duì)AEB也無法規(guī)避事故的物理極限場(chǎng)景,理想汽車推出了全自動(dòng)觸發(fā)的AES自動(dòng)緊急轉(zhuǎn)向功能。在車輛行駛速度較快時(shí),留給主動(dòng)安全系統(tǒng)的反應(yīng)時(shí)間極短,部分情況下即使觸發(fā)AEB,車輛全力制動(dòng)仍無法及時(shí)剎停。此時(shí),AES功能將被及時(shí)觸發(fā),無需人為參與轉(zhuǎn)向操作,自動(dòng)緊急轉(zhuǎn)向,避讓前方目標(biāo),有效避免極端場(chǎng)景下的事故發(fā)生。
全方位低速AEB則針對(duì)泊車和低速行車場(chǎng)景,提供了360度的主動(dòng)安全防護(hù)。在復(fù)雜的地庫停車環(huán)境中,車輛周圍的立柱、行人和其他車輛等障礙物都增加了剮蹭風(fēng)險(xiǎn)。全方位低速AEB能夠有效識(shí)別前向、后向和側(cè)向的碰撞風(fēng)險(xiǎn),及時(shí)緊急制動(dòng),為用戶的日常用車帶來更安心的體驗(yàn)。
?
 京公網(wǎng)安備 11010802028547號(hào)
京公網(wǎng)安備 11010802028547號(hào)
 購(gòu)物車
購(gòu)物車